
National advancement relies on mastering systems that transcend human limitations. A strategic breakthrough in autonomous Mars exploration technology recently showcased a robotic system capable of navigating planetary surfaces three times faster than current benchmarks. By integrating semi-autonomous logic, researchers from ETH Zurich have recalibrated the baseline for space discovery efficiency.
Overcoming the Communication Latency Barrier
Current planetary missions face a fundamental structural bottleneck: the vast distance between Earth and Mars. Communication delays range from four to 22 minutes, necessitating agonizingly slow rover movements. Consequently, traditional rovers cover only a few hundred meters per day. This restricted mobility limits the volume of geological data scientists can analyze within a mission’s operational lifespan.
The ANYmal Solution: Engineering Autonomy
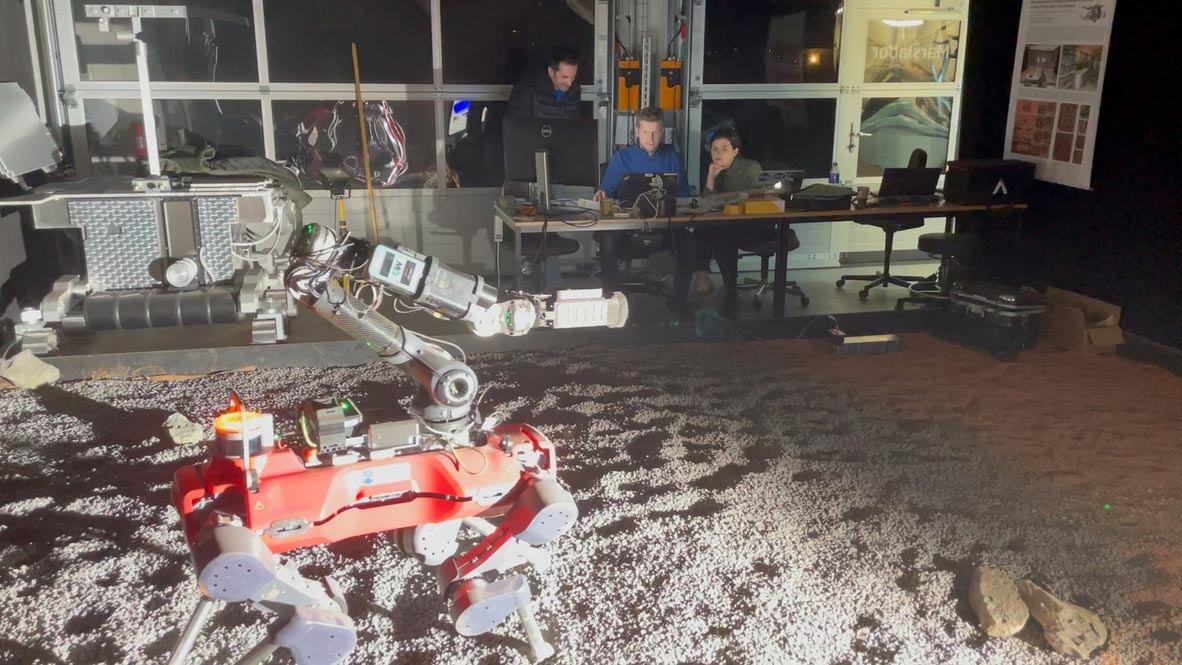
To solve these inefficiencies, a multi-institutional team developed a semi-autonomous approach using the ANYmal robot. This quadruped system functions with reduced human intervention, allowing it to move between multiple targets independently. Specifically, the robot utilizes a microscopic imager and a portable Raman spectrometer to evaluate soil and rock compositions without waiting for Earth-bound commands.
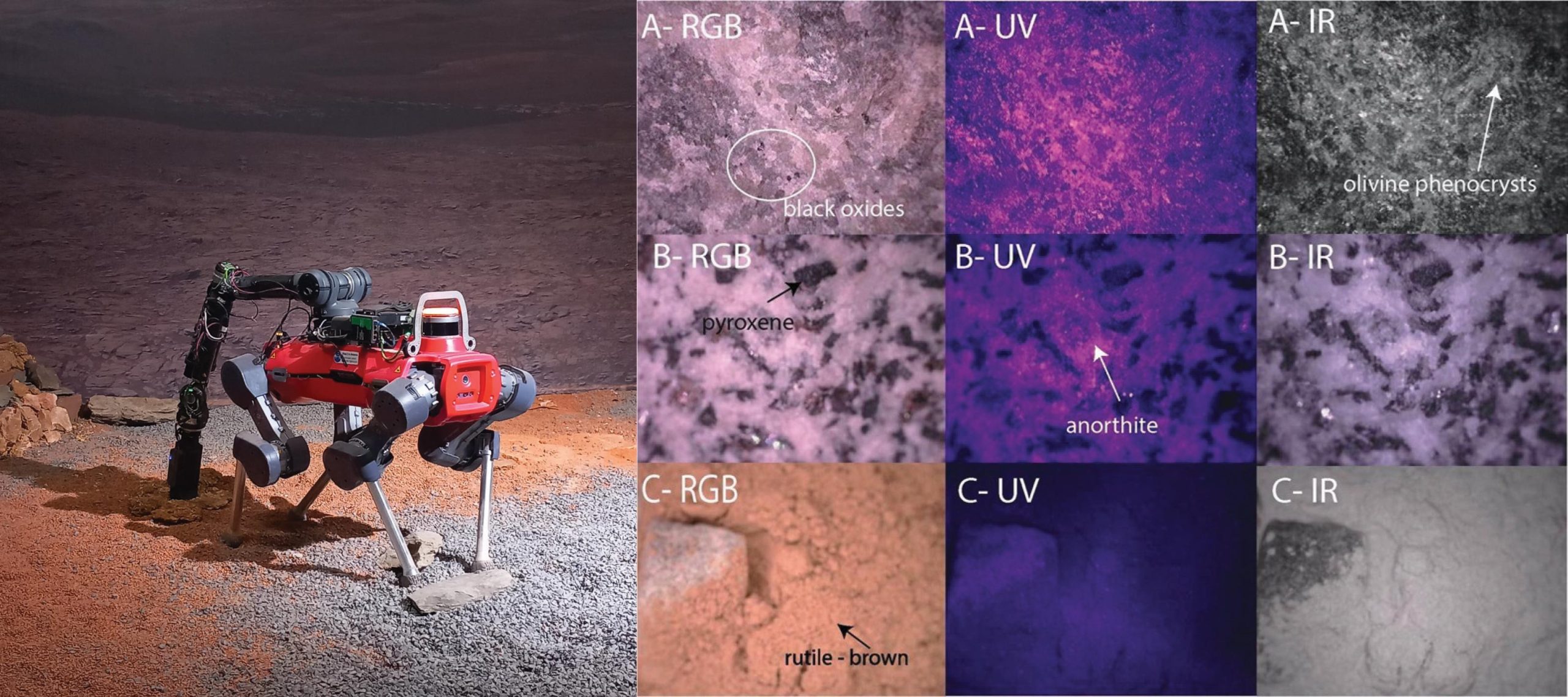
Testing at the Marslabor facility in Basel confirmed the system’s precision. The robot successfully identified critical geological markers, including gypsum, basalts, and carbonates. Furthermore, while human-controlled missions took 41 minutes to complete specific tasks, the autonomous Mars exploration protocol finished the same workload in as little as 12 minutes.

The Translation: Contextualizing Autonomy
In technical terms, “semi-autonomous” means the robot handles the “how” while humans define the “what.” Instead of micro-managing every movement, scientists provide a list of targets. The robot then architects its own pathing and sensor deployment. This shift moves us from remote-controlled toys to intelligent scientific agents that can survive and thrive in high-latency environments.
The Socio-Economic Impact: Precision in Pakistan
While the mission is Martian, the application is local. For a developing nation like Pakistan, mastering autonomous systems is a catalyst for economic modernization. These algorithms can be recalibrated for high-precision agriculture, deep-vein mining, or disaster response in difficult terrain. By training Pakistani students in these STEM disciplines, we move from being technology consumers to system architects, securing our place in the global digital frontier.

The Forward Path: A Momentum Shift
This development represents a clear Momentum Shift. We are transitioning from a period of “safe maintenance” in space exploration to a phase of “aggressive discovery.” By decoupling robot performance from constant human oversight, we enable a scale of exploration previously deemed impossible. This is the blueprint for future resource exploration on the Moon and beyond.







