Accelerating National Advancement through Physical AI Robotics
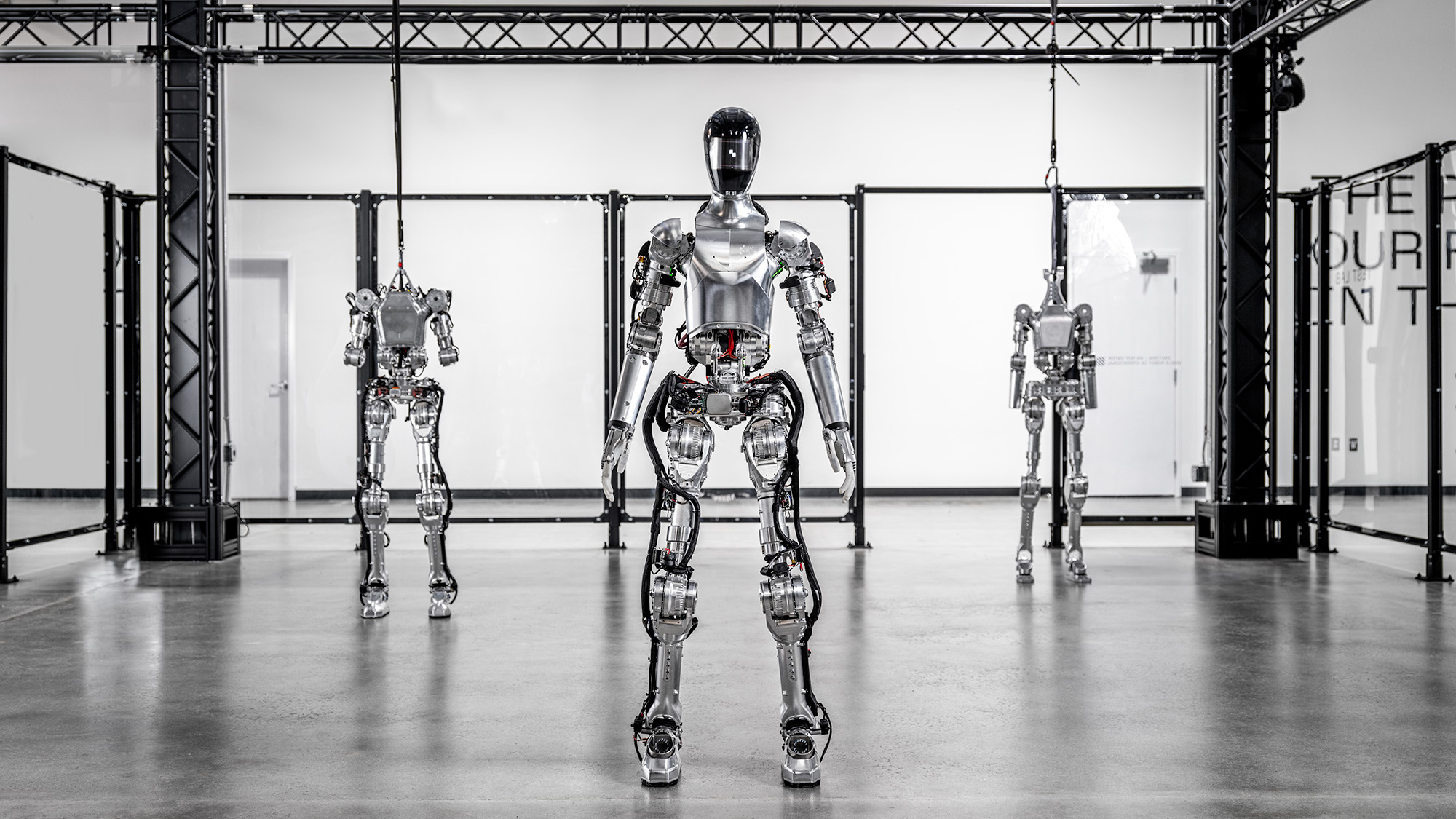
The strategic development of physical AI robotics by Microsoft, embodied in its new Rho-alpha model, signals a fundamental re-calibration of autonomous systems. Derived from the Phi vision-language series, this innovation is engineered to empower robots with unprecedented operational efficacy outside traditional, highly controlled industrial environments. Consequently, Rho-alpha represents a structural catalyst for creating smarter robots AI, capable of dynamic adaptation and intricate task execution in diverse, real-world scenarios. This precise architectural shift addresses the inherent limitations of conventional automation, laying the groundwork for more versatile and intelligent robotic integration within our national infrastructure.
The Translation: Deconstructing Adaptive Robotics for “Next Gen” Clarity
Historically, robots have performed reliably in predictable settings like factory assembly lines. However, their utility diminished significantly in less structured, real-world environments due to an inability to perceive, understand, and adapt dynamically. Microsoft’s Rho-alpha directly confronts this challenge. Specifically, it integrates language, perception, and action within a singular model, enabling robots to interpret natural language commands and translate them into precise control signals. This baseline capability allows robots to navigate and perform tasks dynamically, fundamentally reducing their reliance on rigid, predefined scripts and static instructions. Therefore, this innovation signifies a move from mere automation to genuine autonomous intelligence, fostering Microsoft robotics innovation.
The Socio-Economic Impact: Transforming Daily Life for Pakistanis
This advancement in physical AI robotics holds significant implications for Pakistani citizens across various sectors. For instance, in urban centers, professionals in logistics and manufacturing could witness the deployment of robots capable of handling complex, variable tasks, thereby optimizing supply chains and increasing productivity. Furthermore, students, particularly those pursuing STEM fields, will find expanded opportunities in developing and maintaining these advanced systems, fostering a new generation of skilled professionals. In rural Pakistan, adaptive robots could eventually support precision agriculture or aid in disaster response, navigating unpredictable terrains and conditions more effectively than current solutions. Consequently, this technology promises to enhance operational efficiencies, create high-skill job markets, and improve service delivery, directly impacting household incomes and national growth trajectories.

The “Forward Path”: A Momentum Shift Towards Advanced Autonomy
This development undeniably represents a Momentum Shift for Pakistan’s technological landscape. Rho-alpha is not merely an incremental upgrade; it is a structural redesign of robotic intelligence. By fostering adaptive robot technology that can learn and respond in complex environments, Microsoft provides a baseline for future innovations that will drive significant economic and operational efficiencies. This strategic move positions advanced robotics as a critical component of national infrastructure, catalyzing progress in automation, industrial efficiency, and potentially, public services. Pakistan must calibrate its educational and industrial policies to leverage this structural shift effectively, ensuring our workforce is prepared for this advanced technological integration.
Engineering Autonomy: Beyond Scripted Machine Directives
The core objective of Rho-alpha is to transition robotics beyond simple, scripted automation. This system actively combines linguistic understanding, visual perception, and physical action within a unified framework. Such an integrated approach strategically minimizes reliance on fixed production lines and static directives. Essentially, Rho-alpha translates natural language commands into immediate robotic control signals, allowing machines to respond fluidly and dynamically to evolving tasks. This precision engineering enhances the operational flexibility of robots significantly. Consequently, this real-world AI application marks a crucial step toward truly autonomous intelligent systems.
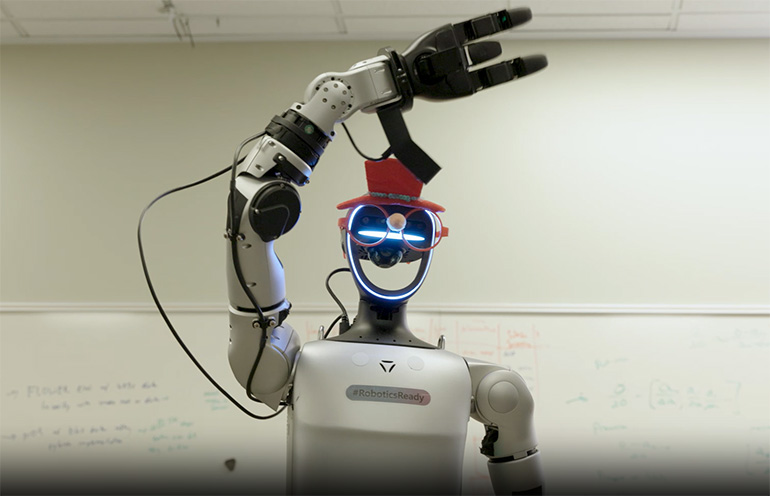
A critical component of this advanced model is its focus on bimanual manipulation. This capability necessitates precise, calibrated coordination between two robotic arms alongside extremely fine-grained motor control. Microsoft asserts that Rho-alpha structurally extends traditional vision-language-action paradigms. It expands both the scope of perceptual inputs and the diversity of learning sources, thereby enhancing the robot’s capacity for complex, coordinated actions.
Integrated Sensing: Vision, Tactile Feedback, and Force Calibration
Rho-alpha integrates advanced tactile sensing directly alongside visual input, establishing a more comprehensive understanding of the physical world. Furthermore, additional sensing modalities, such as force detection, are currently under rigorous development. These augmented capabilities are meticulously designed to enable robots to grasp the nuances of physical interactions, thereby narrowing the critical gap between simulated intelligence and practical, real-world manipulation. This strategic integration ensures a higher degree of operational precision in physical AI robotics.
Microsoft Research confirms these design choices aim to systematically improve how robots manage complex assignments within environments where conditions fluctuate significantly and cannot be fully predicted. Ashley Llorens, Corporate Vice President at Microsoft Research Accelerator, explicitly states that vision-language-action models are fundamentally enabling physical systems to perceive, reason, and act with increasing autonomy in less structured environments. This represents a significant advancement in robot capabilities.

Calibrated Learning: Simulation, Synthetic Data, and Human Integration
A central tenet of Microsoft’s strategic methodology addresses the inherent scarcity of large-scale robotics data, particularly concerning tactile information. To systematically surmount this challenge, the company leverages simulation extensively. Specifically, synthetic trajectories are precisely generated through reinforcement learning utilizing NVIDIA Isaac Sim. These simulated datasets are then meticulously combined with physical demonstrations sourced from both commercial and open datasets, establishing a robust learning baseline for physical AI robotics.
Deepu Talla, Vice President of Robotics and Edge AI at Nvidia, emphasizes that training foundational models capable of reasoning and acting effectively demands overcoming the scarcity of diverse real-world data. He further explains that employing NVIDIA Isaac Sim on Azure empowers Microsoft Research to accelerate the development of critical models like Rho-alpha. These models are engineered to handle highly complex manipulation tasks, demonstrating the power of synthetic data in accelerating development.

Optimized Feedback Loops: Human-in-the-Loop Learning for Robotic Systems
Microsoft significantly underscores the integral role of human corrective input during robotic deployment. Operators can intervene directly using teleoperation devices, furnishing critical feedback that the system systematically learns from over time. This architectural approach establishes a robust training loop. This loop intelligently blends simulated data, real-world demonstrations, and precise human correction, ensuring continuous refinement and adaptation. This methodology reflects a broader, strategic trend within robotics. It leverages advanced AI tools to compensate for limitations inherent in embodied datasets, thereby accelerating learning and operational efficacy.
Professor Abhishek Gupta, an Assistant Professor at the University of Washington, acknowledges that while teleoperated data collection is a common practice, numerous environments exist where teleoperation proves impractical or impossible. Consequently, he notes that researchers are actively collaborating with Microsoft Research. Their objective is to enrich pre-training datasets through the integration of diverse synthetic demonstrations, expertly generated via simulation and advanced reinforcement learning. This structural approach ensures comprehensive data coverage even in challenging scenarios.